Our Projects
Nine specialist sub-teams working across engineering, research, and operations — designing, building, and racing our Hyperloop pod at international competition.
Sub-teams
Members
Innovation
Sponsors

Hyperloop Pod
Visualisation of sub-systems — click to explore.

Explore the Pod
Drag to rotate. Click the hotspots to explore key subsystems.
Engineering at a Glance
Four core technologies that define our competition pod.
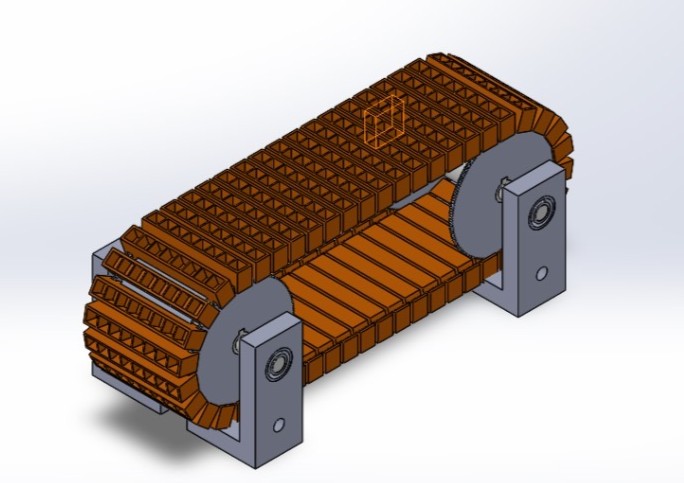
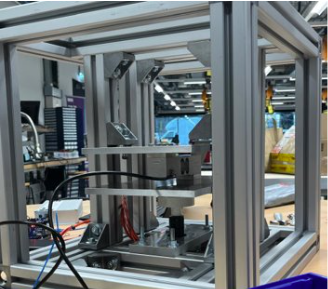
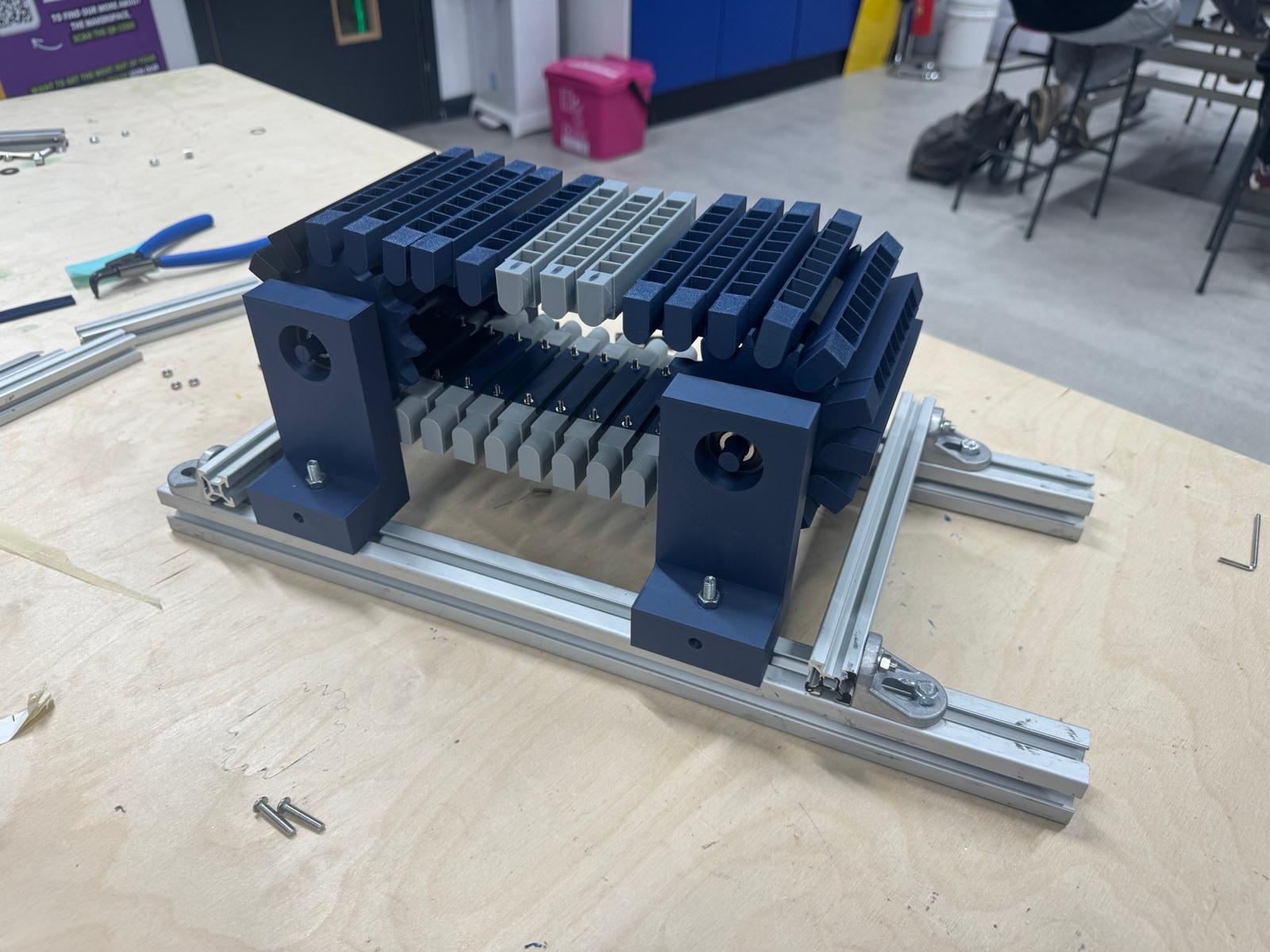
Halbach Array Levitation System
Develops the Halbach array-based levitation system using linear and rotational test rigs to characterise lift and drag at speed. The team works on both theory and physical prototypes to validate simulation models.
- Rebuilt MagLev ski CAD with individual magnets & spacers
- 3D-printed & tested sprocket-gear and herringbone-gear linear rigs
- Ran COMSOL simulations for Halbach arrays and rotational rig parameters
- Got the motor running with fully controllable RPM on the test rig
- Identified and resolved physics issues in the legacy MATLAB lift-force code
- Finalised new motor selection and parameters for the linear rig

 1 / 5
1 / 5
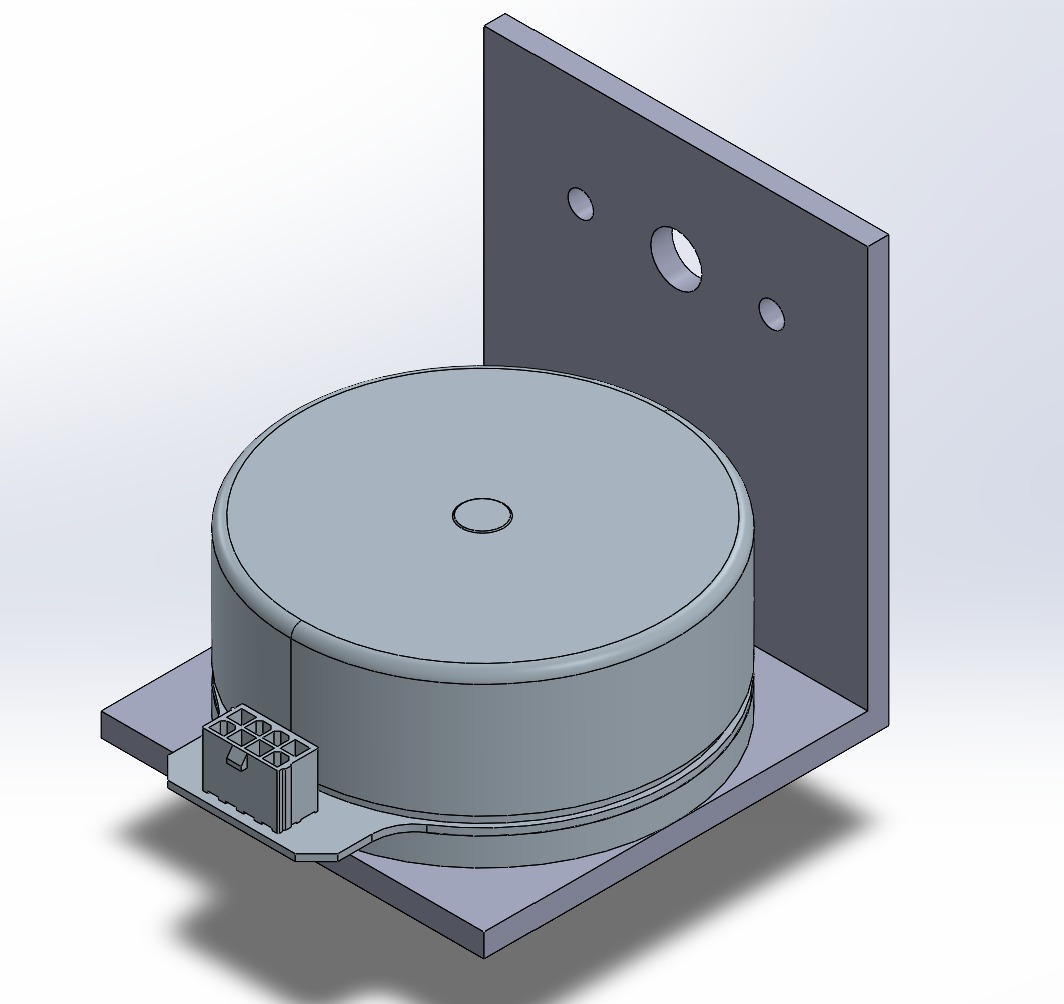
BLDC Motor Powertrain
Designs the BLDC motor-driven powertrain — from motor characterisation and controller selection to mechanical mounting and the battery charging system. Responsible for getting the pod up to speed on competition day.
- Completed BLDC motor characterisation curve (voltage vs. torque/speed)
- Got all 4 motors spinning in tandem
- Iterated motor + controller CAD mount design to v2
- Completed EHW requirements review and battery risk assessment
- Refined torque-speed model, speed-time curves and drag-force analysis
- Selected wheels and completed initial tensioning-system design
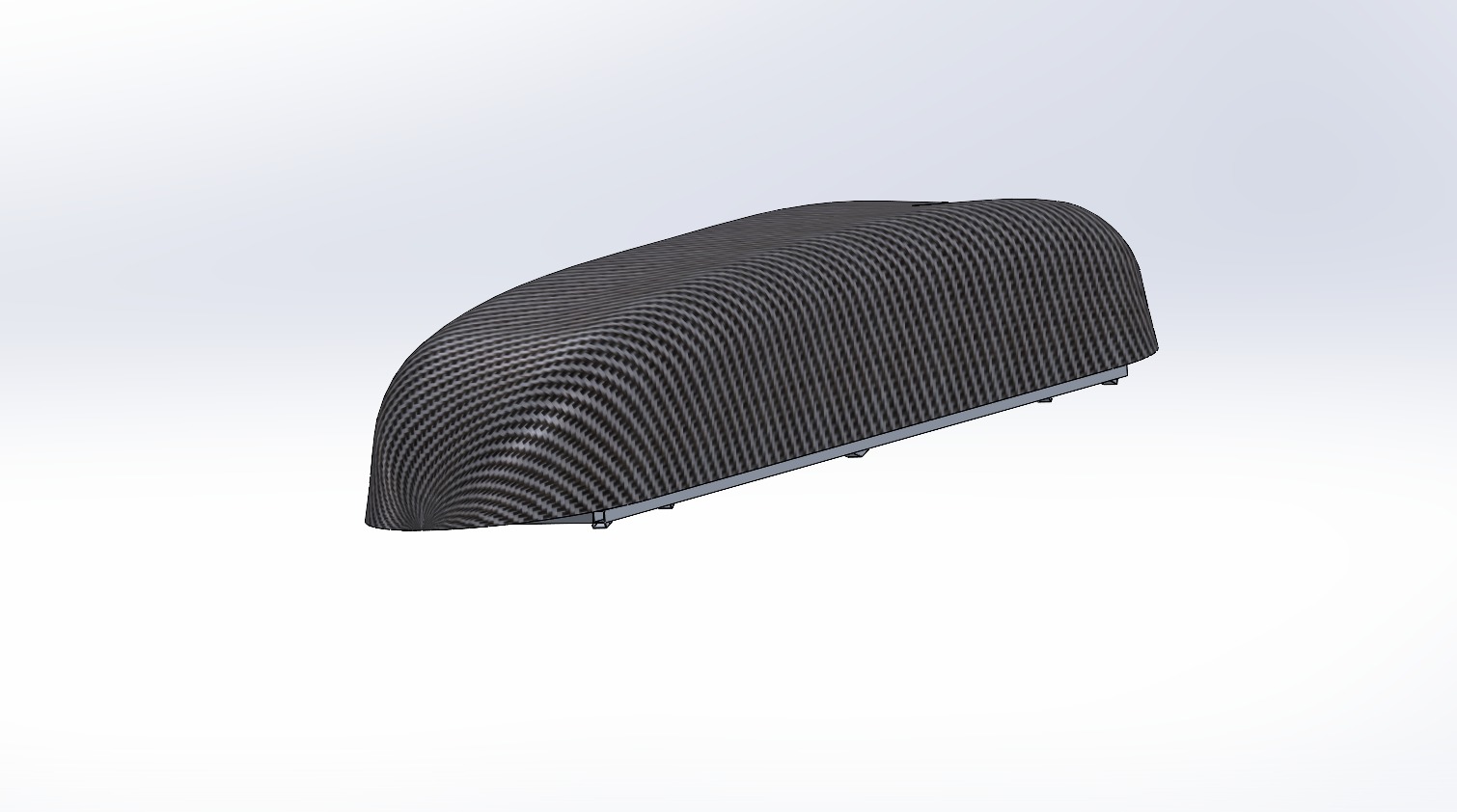
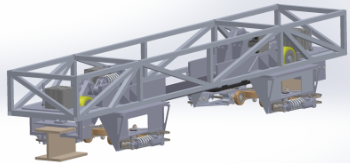
Structural Frame & Carbon Fibre Shell
Designs and manufactures the structural frame and aerodynamic carbon-fibre outer shell that houses all pod systems, ensuring structural integrity and full competition compliance.
- Updated chassis CAD to Version 3 from full physical measurements
- Verified chassis compliance against both 2024 and 2025 EHW regulations
- Manufactured new MagLev mounting plate brackets
- Completed outer-shell design with CFD analysis and full assembly integration
- Secured CTL (tooling) and Airtech (bagging) sponsorship
- Completed the full carbon-fibre lay-up on schedule
 1 / 3
1 / 3
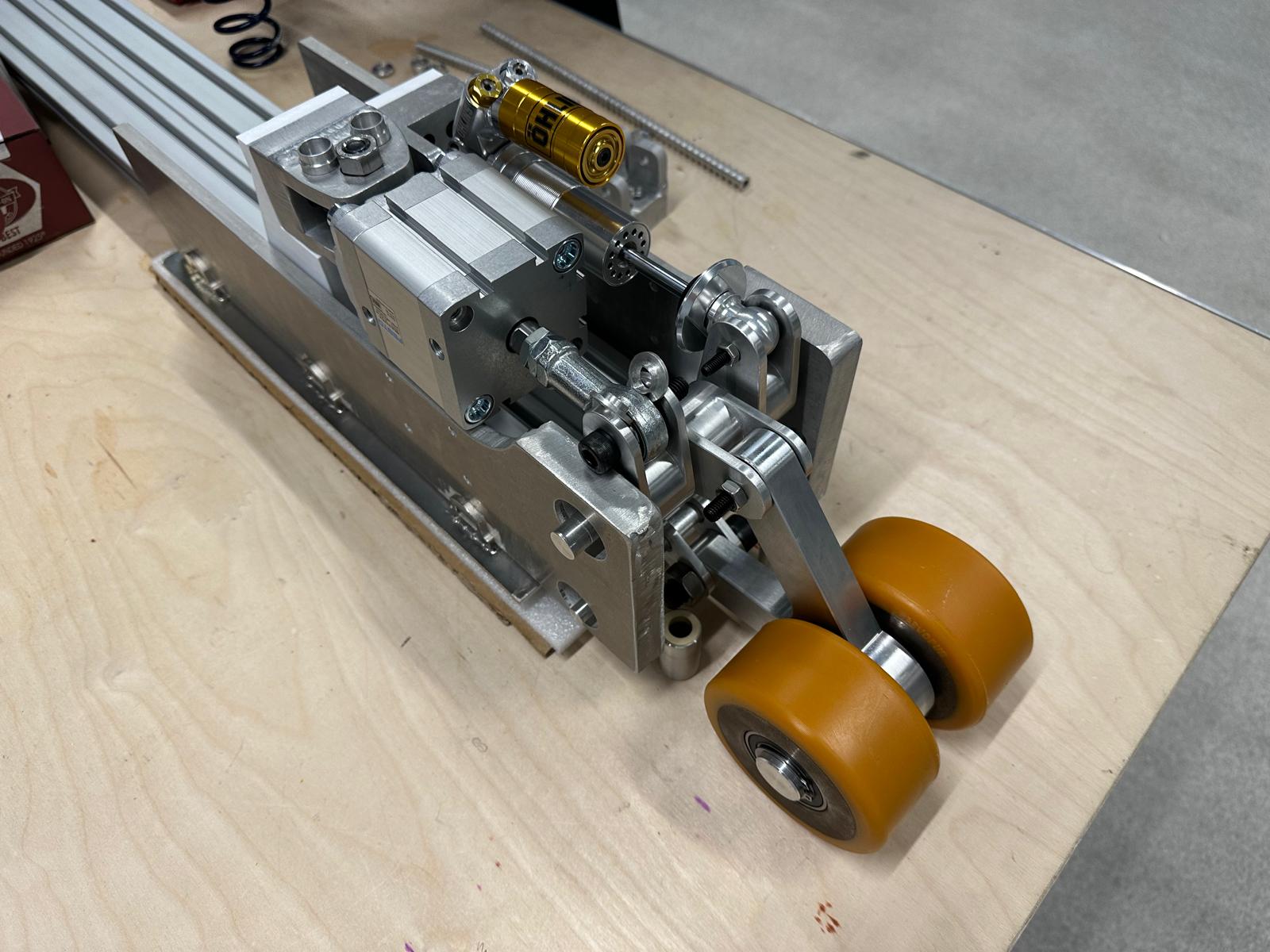
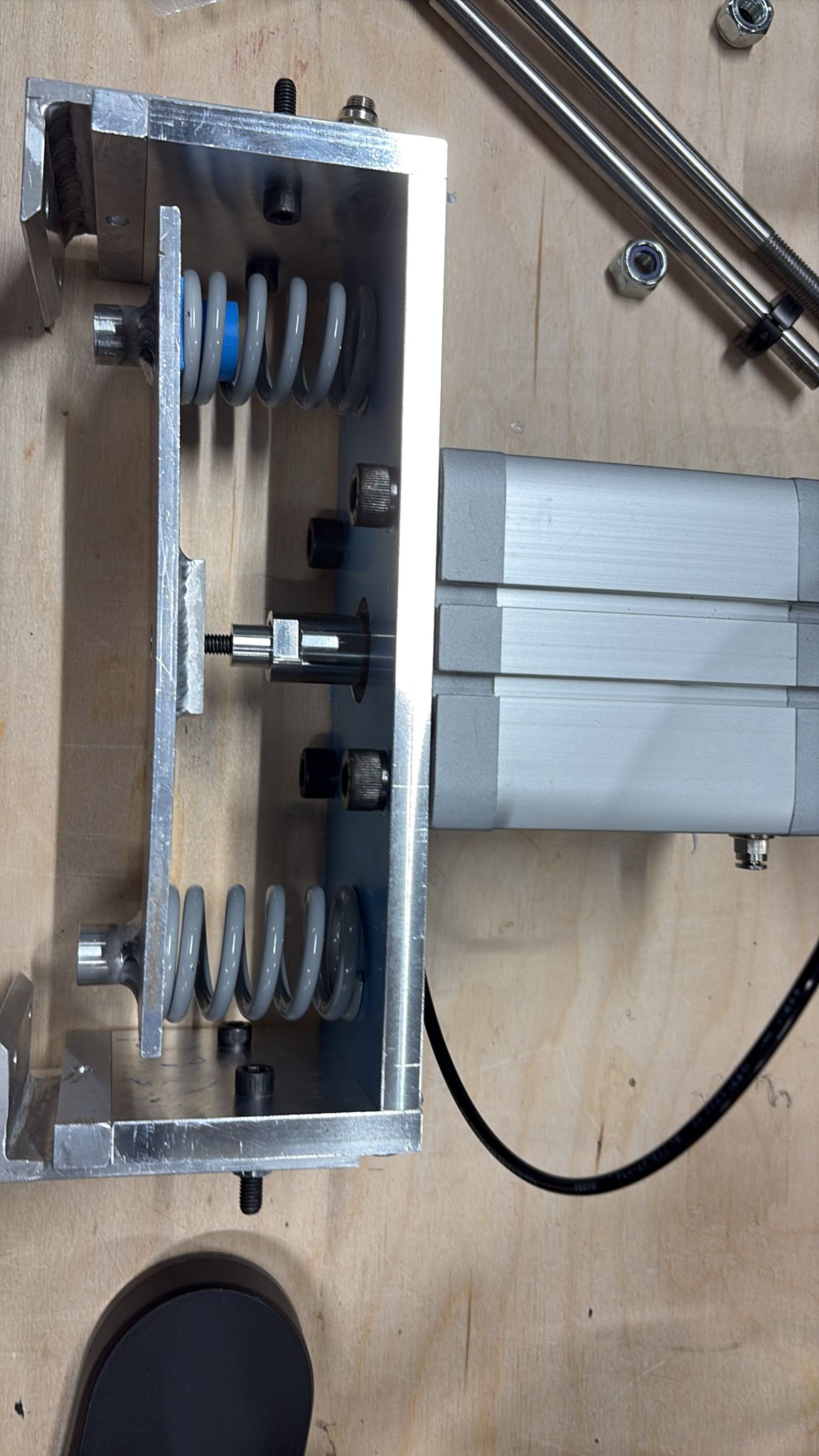
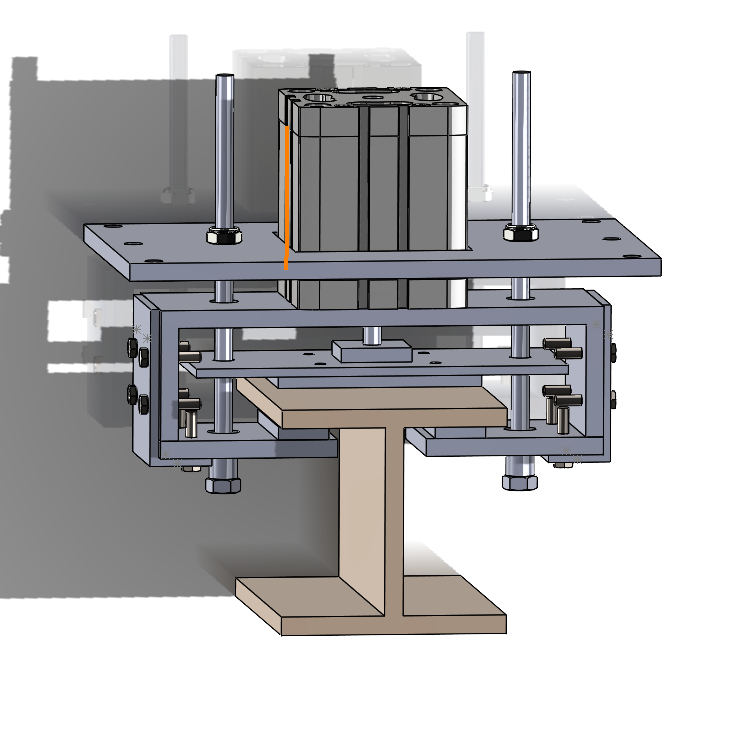
Vibration Isolation System
Engineers the top and side suspension systems that isolate the pod chassis from vibrations and maintain stable levitation geometry throughout a run. Integrates tightly with the braking pneumatics.
- Completed full prototyping of the top suspension system
- Finished all machining and workshop work in the Makerspace
- Press-fit bearings into side plates; finalised damper & actuator locations
- Ran Ansys simulations for both top and side suspension
- Eliminated workshop dependency by resolving the side-plate machining issue
- Integrated pneumatic system with the Braking sub-team
 1 / 3
1 / 3
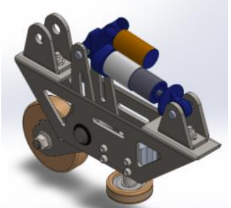
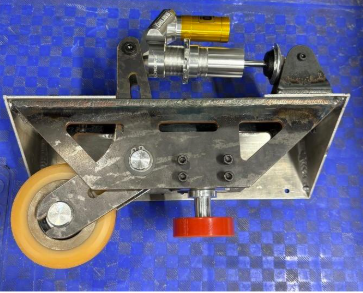
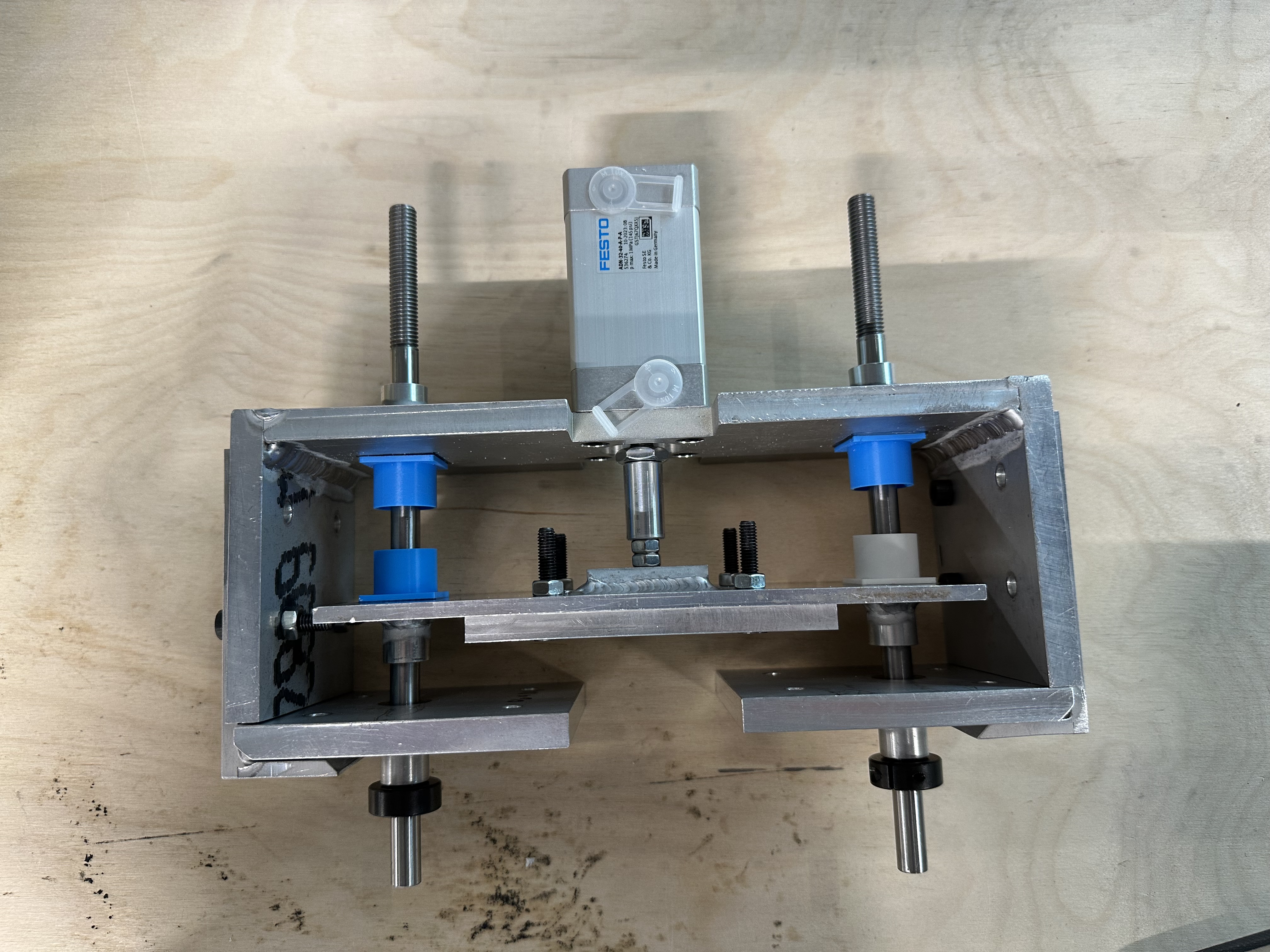
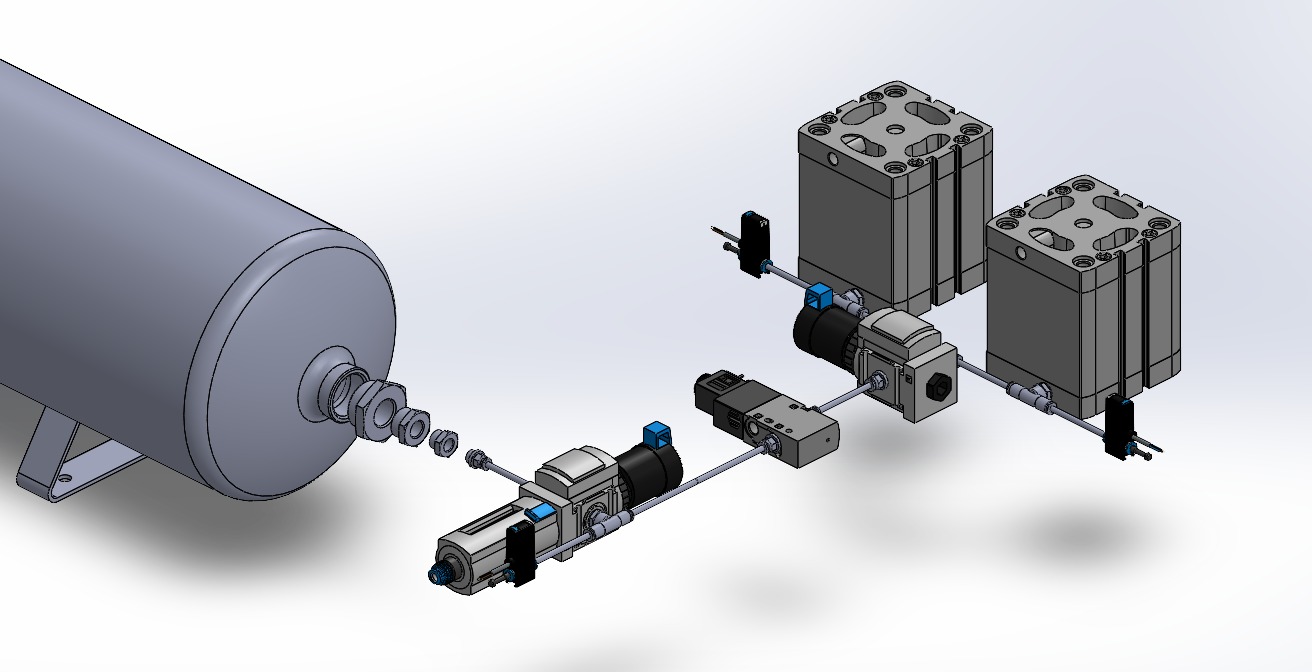
Pneumatic Braking System
Responsible for the pod's emergency and service braking, using a FESTO pneumatics-actuated system with selected spring and brake-pad configurations. Safety-critical and competition-tested.
- Full CAD redesign: attachment plate, L-bracket, and coupling
- Manufactured and assembled the complete mechanical braking system
- Selected springs from Lee Springs and Spring Masters after testing
- Chose bicycle brake pads as the final brake-pad solution
- Assembled FESTO pneumatics system with the Suspension team
- Developed MATLAB code for braking force vs. temperature analysis
 1 / 4
1 / 4
Electronics
Develops the PCBs, STM32 embedded firmware, and control software that tie all pod systems together into a single integrated platform. From sensor data acquisition to motor control.
- Delivered STM32 microcontroller and KiCAD PCB design training
- Split into STM32 programming and PCB design streams
- Designed and prototyped the generation board PCB
- Resolved KiCAD component sourcing issues and received all parts
- Prioritised brakes-first board to match hardware delivery schedule
- Coordinated valve-control and braking specs with the Propulsion team
Pictures coming soon
Full Scale Research
Conducts biomimicry-inspired research into full-scale Hyperloop infrastructure — from pod geometry to tube materials and structural analysis. Bridging today's pod to tomorrow's system.
- Studied woodpecker impact resistance for damping mechanism design
- Analysed cat-paw structure for side suspension applications
- Optimised pod geometry using Kingfisher & Peregrine Falcon biomimicry
- Completed vacuum tube stress analysis and material selection
- Researched cost-effective tube materials: epoxy, rubber & concrete composites
- Updated team website with previous-year projects and member list
This team's work is documented in our published research papers and dissertations.
View Research →Autonomous Inspection Rover
Building an autonomous inspection rover with a robotic arm to operate inside the Hyperloop tube — equipped with sensors for real-time monitoring and maintenance of tube infrastructure.
- Ran a crash-course CAD onboarding programme for new members
- Researched control systems, power options, and motor selection
- Selected Raspberry Pi as the main control platform
- Evaluated pre-made vs. DIY robotic arm options
- Designed and iterated the chassis CAD model
- Explored piezoelectric pressure sensors and magnetic wheel concepts
Images coming soon
Industry Partnerships & Communications
Manages industry partnerships, secures sponsorships, handles social media communications, and plans team events and community engagement. The engine behind our external relationships.
- Secured CTL sponsorship for outer-shell tooling and machining
- Secured Airtech sponsorship for layup, bagging, and curing support
- Progressed a data-acquisition sponsorship with Dewesoft
- Ran weekly LinkedIn posts covering Makerspace and sub-team milestones
- Hosted a cross-team social with Formula Student
- Planned and organised the Alumni Event
See our industry sponsors and partner network on the Partners page.
View Partners →Meet the Team
Want to see who's behind each sub-team? Visit the Team page to explore every member across all years — from our 2025/26 roster to the founding group in 2019.
View the Team →